| *1 - Bohrloch
Das Borhloch besteht aus 2 Teilen: einem untiefen realen Bohrloch,
welches über ein Rohr mit dem darunter befindlichen „Mobilen
Bohrloch“ verbunden ist.
*2 - Mobiles Bohrloch
Eine Kiste unter dem realen Bohrloch, welches die „Vertigo
Technologie“ beinhaltet. Diese ermöglicht eine fiktive
Sondentauchfahrt anhand von „Schnur-Fühlen“ und
simuliert ein Bohrloch von 120m Tiefe.
*3 - Vertigo-Technologie
Befindet sich im „Mobilen Bohrloch“ und ist ein selbstkonstruiertes
System bestehend aus Elektronik, Mechanik, Sensoren, Motor, Spulen
und natürlich der Sondenschnur. Dieses System ermoeglicht,
dass die Sondenschnur 50m hinauf gezogen oder hinabgelassen werden
kann mit dem Gefühl einer Sonde am andere Ende der Schnur zu
haben (Druck, Gewicht und Bewegungen), die durch die Tiefe bewegt
wir ?d. Ausserdem sendet das System die Schnurbewegung und Tiefendaten
der „Sonde“ hinauf zu einem PC mit der Software „Wankel“.
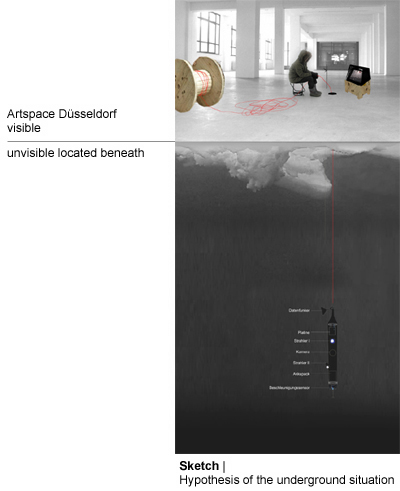
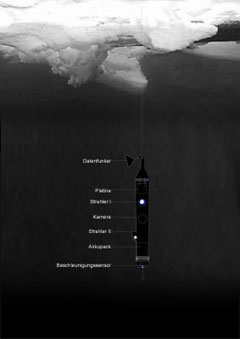
*4 - Sonde
Die Sonde ist das Resultat der gesamten Technik. Zwischen den Fingern
kann man sie durch das Bohrloch tauchen spüren. Man kann ihre
Tauchfahrt, die verborgenenen Welten und Eishorizonte an denen sie
vorbeizieht, auf dem Monitor sehen. Der Motor im „Mobilen
Bohrloch“ wird anhand der Schnur-Bewegungen und Tiefe gesteuert,
so dass die Schnur ein eigenes Leben erhählt; man fuehlt ein
eigenes Gewicht, Druck, Gegenzug, Ruckeln, Gleiten, z.B. wird sie
(Gegenzug der Schnur) schwerer, je tiefer die Sonde getaucht ist
(zur Simulation von Erdanziehungskraft)
*5 - Wankel Software
Die Software mit dem Namen „Wankel“ ist in MaxMSP/Jitter
geschrieben und navigiert in Echtzeit durch die Applikation „Tiefen-Eis“
entsprechend der Sonden-Schnur Bewegungen und Fingerspitzengefühl.
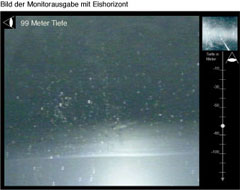
*6 - Tiefen-Eis
„Tiefen-Eis“ sind Videobilder, die von 2 Kameras an
der fiktiven Sonde uebermittelt werden, auf dem Monitor neben dem
Bohrloch sichtbar sind. Videomaterial aus realen antarktischen Eisbohrloechern
(danke der freundlichen Unterstuetzung der NASA) sind in die Applikation
integriert und mit fiktiven Elementen, Bewegtbilder in Echtzeit
kombiniert.
|